- Свеж
")
Orbslam2+Mapping Octomap : Orb-SLAM2 е SLAM рамка со отворен извор што поддржува монокуларни, двогледи и RGB-D фотоапарати Може да ја пресмета позицијата на фотоапаратот во реално време и да ја реконструира околното опкружување ретко во 3Д во исто време. Во режимот RGB-D, може да се добијат информации за реална скала. RTAB-MAP 3
D визуелно мапирање и навигација : Користејќи го алгоритмот RTAB за интегрирање на видот и радарот, роботот реализира 3Д визуелно мапирање и навигација и избегнување на пречки и го поддржува глобалното преместување и автономно позиционирање. Развој на Media
Pipe : Преку рамка за развој на Media
Pipe, завршени функциите на откривање на рацете, откривање на држење на телото, целокупно откривање, откривање на лице, 3Д откривање и препознавање. Избегнување на мапирање и навигација со лидар-може да реализира gmapping, hector, Karto, алгоритми за мапирање на картограф, планирање на патеката за поддршка, динамично избегнување на пречки, навигација со единечни точки и мулти-точки. Мулти-робот навигација : Повеќекратни роботи се на истата мапа за да се постигне навигација со еден момент, навигација со повеќе точки и динамично избегнување на пречки. Mapping Orbslam2 : Целосно автоматска иницијализација користејќи го методот на екстракција на карактеристиките на ORB. Податоци за длабочина на слика / точка на облак на облак : Мапата за длабочина, мапата во боја и мапата за облак на точката на камерата може да се добијат преку соодветните јазли. Контрола на синхронизација на мулти-робот : Една рачка контролира повеќе роботи во реално време, ги комплетира уредните и униформните движења и ја реализира функцијата на синхроната контрола. Мулти-робот редица Show : Повеќе роботи одржуваат три формации во реално време. РРТ ги истражува и гради мапи независно : Поставете ја областа за истражување и користете го алгоритмот RRT за да реализира автономно истражување и мапирање, заштеда на мапи и враќање во точката на потекло. KCF Target Tracking : Заснована корелација на сликата KCF алгоритмот може да избере кој било предмет на сликата и да ја следи целта во реално време. Autopilot : Поддржува сопствен избор на боја, а роботот може автоматски да ја идентификува областа на бојата за да ја следи линијата. Препознавање/следење на бојата : Изберете специфична површина во боја на екранот и оставете го роботот да ја следи оваа боја во реално време. Признавање на ознаката AR - Поддржува динамично следење и откривање на етикетите за QR код и ги добива Pose координатите на QR -кодот во реално време. AR AUTHEMENTATION : Изберете ја соодветната графика преку апликацијата и оставете ја графиката да се појави на хартијата за проверка на таблата преку технологијата за подобрување на AR. Разубавување на визуелна слика : Видео -сликата се трансформира со Open
CV, а соодветниот алгоритам се користи за да се постигне ефектот на разубавување на сликата. Lidar Guard : Цели што се поблиску до Лидар ќе бидат заклучени, а предниот дел на роботскиот автомобил секогаш ќе се соочи со оваа цел. Избегнување на пречки во Лидар : Лидар ја открива околината во реално време и планира да избегне пречки. Комплет за роботско учење ROS за повеќе верзии : Yahboom обезбедува 4 верзии на одбор за развој на Rosmasrer X3, можете слободно да изберете etsетсон Ксавиер NX, Jetson TX2-NX, Jetson Nano или Raspberry Pi 4
B, засновано врз различните проблеми со перформансите на овие развојни табли, Вреди да се разгледа мазноста на работењето, Yahboom го препорачува економичното etsетсон TX2-NX. Длабоко истражување на алгоритмите на АИ и интелигентни роботи : Росмасрер X3 е опремен со длабочина камера, лидар и модул за гласовна интеракција, кој може да го реализира оперативниот систем ROS, RTAB 3
D мапирање навигација, PCL 3
D точка облак, SLAM мапирање навигација, машина за навигација, машина Визија Апликации, Гласовна интерактивна контрола, програмирање на Пајтон, развој на STM32, развој на Media
Pipe, обука на модели на YOLO, забрзување на Tensorrt (Белешка : Различни карактеристики зависат од верзијата што ја избравте). Богати материјали за курсеви и професионален тим за поддршка по продажбата : Обезбедуваме 103 видео курсеви со двојни јазици и техничка помош преку Интернет (време на Кина). Содржината на курсот вклучува : Собрание на Rosmaster X3, оперативен систем Linux, курсеви за серии ROS и Open
CV, длабочина камера и мапирање на лидар и објаснување за навигација, од едноставно до детално учење на мапирање и навигација, ова е длабински процес на учење, но Препорачуваме да има основни корисници на програмирање да го користат овој комплет за роботи. Поле за апликација : Rosmaster X3 обезбедува модел за истражување за професионалци, може да научи алгоритми, да добие терен во непознато поле, може длабоко да научи визуелно препознавање на АИ, истражување на автономно возење, истражување на 3Д -објекти, итн. Одлична конфигурација на хардвер : алуминиумско легура, 3600, 3600 ° Онидирекција Меканум тркала, опционална лидар, висококвалитетна камера за длабочина, опционален модул за гласовна интеракција, професионално дизајнирана табла за експанзија. Ова е професионален робот ROS кој поддржува поголем развој. Корисниците можат повторно да се развиваат и учат на постојните курсеви. Белешка : Јахбом обезбедува само техничка помош за постојните курсеви. Целиот детален развој треба да го заврши самите клиенти. Комплет за роботско учење ROS за повеќе верзии : Yahboom обезбедува 4 верзии на одбор за развој на Rosmasrer X3, можете слободно да изберете etsетсон Ксавиер NX, Jetson TX2-NX, Jetson Nano или Raspberry Pi 4
B, засновано врз различните проблеми со перформансите на овие развојни табли, Вреди да се разгледа мазноста на работењето, Yahboom го препорачува економичното etsетсон TX2-NX.

Лесен за употреба рачен безжичен систем со одличен звук Скенирањето и синхронизацијата 1 копчиња го оле

100% Сосема нов и висок квалитет, Овој Производ Се Тестираат Пред Превозот Хуашенг Суда Замена За Преград�

Адаптер за шише со гас Со автоматска функција за затворање Светло во тежина Лесен за користење...

Боја : Сребрена Број на модел : EM573 B Големина : 1 : 43 Модел : 911 (991 Испорака : бесплатна испорака низ целиот св

?♂Ги прави вашите мотоцикли повеќе модни и кул на улица;Подобрете го изгледот на вашиот мотоцикл со ови�

1Висока прецизност, отпорност на тежок товар.Повторете ја точноста на Позиционирање од 0,1 милиметри.Хор�

Пакетот вклучува : 5 парчиња пластична палета 10 парчиња четки за рамни бои во сина боја Материјал : Палет�

Продолжете го животот на вашата CPAP машина Aquap Papor Distilled CPAP вода е во согласност со упатствата за производ
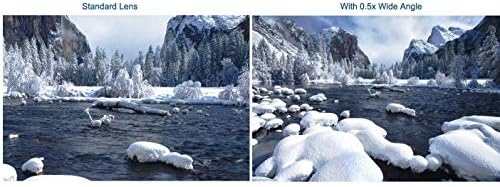
0,5 x (0,45 x Вистински) Широкоаголен Објектив (Хромирана Завршница) Сите СтаклоМултикоатирани Оптика, Намен

Струја : 15АМатеријал : Пластика Карактеристики : Моментално Број на модел : LXW511 G3 Тип на прекинувач : Микр�
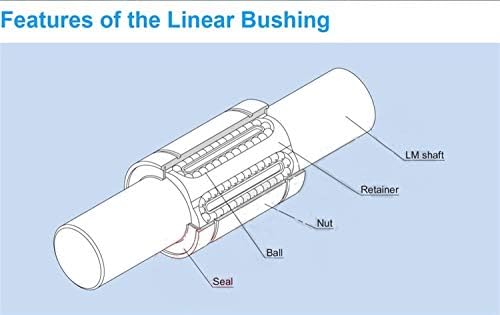
Модел : LM4 UU Број На Топчести Редови : 4; Тежина : 3 гр внатрешен дијаметар : 4 мм; надворешен дијаметар : 8 мм; �
Сертификат за автентичност со секоја нарачка Сите наши слики се оригинални фотографии од архивата за п�

Професионални четки за уметност за нокти : Сет на четки за уметност Chenyiyi Nail содржи три четки за нокти со �

0,194 "Дијаметар (+0003" / 0 ") карбид врзан меч 5" Целокупна должина 11 / 64 "Дијаметар на шанк 1 1 / 8" Должина на флеј�

32 GB USB 20 модна нараквица за нараквица U диск (црна).0 модна нараквица за нараквица U диск (црна)...

Соодветни артикли : getе добиете 6 парчиња знаци за прикажување во црна, класична и модерна, што може да се

Материјал : Вафли КрпаИзработена од 80 / 20 мешавина од полиестер и полиамид Големина : 40,5 см (16 инчи) * 61 см (2
【Боја со комплет за дијаманти】 Овој комплет за дијамантска уметност за возрасни е 100% полни дијаманти, �

▶ Сосема нов кондензатор на Климак! ▶ 55 + 5 UF / MFD 440 Волт ▶ Пад на замена, не се потребни промени во жици ил�

Кратка кадифна + гума Направено од висок квалитет гумен материјал, водоотпорен и издржлив Надворешниот

Ви даваат одлична погодност да организирате и чувате рачни алатки Густо и цврсто платно Пет патеки за п�

Quiiboom Омбре Боја Намотани Кабел Серија Q Бојата е описна Бојата помага да се изрази светлината, а не физич

Микро Исклучување : Совршена Услугаако имате какви било прашања, можете да не контактирате и ние ќе го р�

Димензија : 35€7€2 СМ), може да собере 3 кратки кармини Материјал : Изработен Од вештачка микрофибер кожа з

Продолжна Прачка од колекцијата Квизел Големина На Предметот : Должина : 0 50 инчи Висина : 6 00 инчи Ширина :
Големина : 3,7 см х 5,8 см (1,5 инчи х 2,3 инчи) Класификација : ножици За Нокти, Секач, ножици Карактеристика : Му

Големина : 16°24 инчи тоа може лесно да се оди со било која кујна декор Материјал : Изработен од висококвал�

Светлината Тела Рамка € 1 Семе Стакло Сенка € 4 Додаток Пакет € 1 Инструкции За Инсталација €1...

Удобно користи Тешка должност : Тоапред ремените за глуждот се направени од сбр+пп материјал и обрнува в
Големина : 7 cm x 6 cm x 0,8 cm (2,8 инчи x 2,4 инчи x 0,3 инчи) Класификација : огледало, преклоп, шминка, двојна страна...

Кафез Ореви Слободен пловечки плоштад орев задржани во рамките на пролет челик кафез Квадратна Навртка

Број на модел : CP1 WMAD42 Квалитет : Најдобро Пакет : Стандард Гаранција : 1 година Број на модел : CP1 WMAD42 Квалит

Плочата за печат на ноктите е изработена од висококвалитетен материјал од не'рѓосувачки челик Плочи за

Големина : 10,2 см x 19,5 см (4 инчи x 8 инчи) Класификација : виси чанта, мобилна торбичка, џеб Карактеристики : и

楠竹菜板,Сечење board家用切菜板,Сечење board水果砧板Kitchen нож ,caidao,菜刀菜板,Сечење board二合一厨房加厚案板三件套 楠竹菜板,Сеч�

4 парчиња Прибор за Јадење Пакетот Вклучува : Премии Квалитет : Нашиот Организатор За Божиќни Прибор Е И�

ЗАБЕЛЕШКА : 2 парчиња / Сет, т10 912 921 големина, ве молиме двојно проверете ГИ ВАШИТЕ ОЕМ халогени светилки п

Повлечен и прилагодлив Ставете ја вашата микробранова печка или електрична печка на овој држач монтир�

Секој пар терминали се изолирани едни од други за да се спречи хаосот на кола Бифурираниот претходно из�

Бидејќи се одразува без да избега од телесната температура, не е премногу топла удобна топлина ● бидејќ

100% Природно Памучно Јаже Оваа висока пречка е изработена од 100% природен памук што го направи попречувач

Материјали : Фина структура на бакар, керамички филтер, без капе, издржлив, погоден за долгорочен контак�

Професионален Шок Монтирање : специјално дизајниран за микрофон за намалување на вибрациите Намалете г